表面電位センサ EFSシリーズ
表面電位センサの構造
感光ドラムの表面電位を検知する"眼"となるプローブ部は、電気力線の遮蔽翼を備えたチョッパ(音叉型振動板)とそれを駆動するための圧電素子、表面電位を検知するための検知電極、インピーダンス変換用プリアンプ部(検知回路)で構成されています(図1)。センシングの要となるこの小型圧電アクチュエータ制御機構は、外来ノイズを遮断するコンパクトな金属シールドケースに納められ、検知電極面の上部に開けられた窓が感光ドラムの表面と対向するように複写機内に装着されます。

表面電位検知の必要性
静電複写機は一般的に次のようなプロセスで複写を実行します。
- 1) 帯電:帯電器のコロナ放電で感光ドラムの表面を一様に帯電します。
- 2) 露光:露光部分は導電性となり、表面の電荷が逃げて消失します。
- 3) 現像:帯電したトナーを潜像に付着させ、可視像を得ます。
- 4) 転写:感光ドラムに付着したトナーを紙に転写。
- 5) 定着:紙に転写されたトナーを熱で溶融して固着させます。
- 6) 清掃:転写後、感光体上に残留しているトナーを除去し初期状態に戻します。
画質品位を常に最上の状態に保つうえで重要となるのが、感光ドラムに付着するトナー量の最適化であることは言うまでもありません。
そのためには、上記プロセス3)の現像タイミングにおいて、感光ドラムの帯電状態をあらかじめ設定した最適値に常に保つ必要があります。そこで、6)清掃直後のドラム表面電位を正確に検知し、1)の帯電(コロナ放置)強度を制御する機能が必要になります。その機能と制御の概要を図2に示します。
図2 表面電位最適化制御の概念
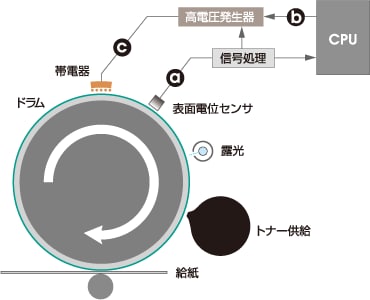
機能と制御の概要を上のモデルに示します。表面電位センサは、検知した表面電位レベルを電圧信号として処理回路を介してCPUに伝え(a)、これを受けたCPUが高電圧発生器を制御(b)。帯電器が発生するコロナ放電の強さを調整します(c)。つまり、環境による変化や経時的な劣化が感光ドラム表面の帯電特性に生じても、この一連の検知- 制御プロセスにより、感光ドラムの帯電状態は、高品質画像に最適化されたレベルを維持することができます。
もちろん、この制御系の能力と信頼性を決定づけるファクタは表面電位センサの検知精度と出力安定性ですが、複写スピードの向上に寄与する必要性から、その応答速度についてもさらなる高速化が求められています。
EFSシリーズの優位性と適用メリット
EFSシリーズは、独自の高安定出力回路により検知出力(0~4.5V)の変動幅を±0.05V以下に抑制し、検知応答速度も高速機対応11msec.(typ.)を達成しました。さらに設定可能な検知距離も1.5~3.5mmに拡大。この範囲であれば出力電圧の変化は小さく、周囲温度の変化に対しても堅固な出力安定性を発揮します。
表面電位検知メカニズム
プローブを構成するアクチュエータ部と検出回路の関係について、感光ドラム表面が負に帯電している図3のモデルで説明します。

感光ドラムの表面から数ミリの距離を置いて対向するプローブ内の検知電極面には、空気を媒体とした静電結合(図中、赤色で示した電気力線)により、感光ドラム表面に帯電した負の電荷(窓と電気力線遮蔽翼で切りとられた面積分の電荷)と等価な正電荷が誘起されます。
この状態で、チョッパ基部に接着した圧電素子に駆動電圧を印加すると、この図では縦方向に圧電素子が伸縮し、チョッパに加わるたわみ応力により先端部の電気力線遮蔽翼が周期的に開閉します。
この遮蔽翼の規則的な開閉運動により、プローブのシールドケースに開けられた窓を通過する電気力線の量、すなわち検知電極面に誘起される電荷量も周期的に増減することになり、回路的には周期的に容量を増減する可変コンデンサと等価に扱うことができます。以下、そのあたりの変化状況をもう少し詳しく説明いたします。
検知部の動作モデル
電気力線遮蔽翼の動きを追ったモデルを図4に示します。電気力線遮蔽翼は、中点→開max.→中点→閉min. →中点を周期とする開閉運動を繰り返し、感光ドラム被測定面と検知電極の間を結ぶ電気力線の数も、この周期にしたがって増減します。


この一連の変化を前出(図3)の「プローブの検知回路モデル」でみますと、電気力線遮蔽翼の開閉によって検知電極面に誘起される周期的な電位の変化は、インピーダンス変換用プリアンプ内部の入力容量Ciと入力抵抗Riの合成インピーダンスを通じて、グランド基準電位との間で電荷の出入りを発生させていると理解できます。
その結果、プリアンプの交流出力Voは、感光ドラム被測定面の対地電位Veに比例することがわかります。
そして、この際にチョッパの振幅とブリアンプ交流出力との間には、
- 1) 感光ドラムの対地電位Veが一定の場合、プリアンプの交流出力はチョッパの振幅に比例。
- 2) チョッパの振幅が一定の場合、ブリアンプの交流出力は感光ドラムの対地電位Veに比例。
の関係が成立し、チョッパの振幅安定性によってセンシング精度が左右されることになります。
フィードバック回路による安定出力
そこで、この基本的な課題をクリアするために、検知電極以外のプローブ構成部品を検知電位と同電位にする独自のフィードバック回路を適用し、安定した検知精度を確保しました。その概念を、図5に示す回路ブロック図の流れに沿って説明します。

この方式は、プローブ電圧をグランド電位から切り離し、インピーダンス変換用プリアンプから交流電圧として取り出された検知信号を交流増幅→同期検波→積分回路、さらに絶縁トランスで高圧増幅し、プローブ基準電位にフィードバックするものです。
この負帰還によって、検知信号が限りなくゼロに制御され、同時にフィードバック電圧が被測定電圧に等しくなります。すなわち、この独自回路の適用により、チョッパ振幅や検知距離に変動が生じた場合でも、それらの影響を受けることのない信頼性の高い被測定電位(フィードバック電位)が得られることになります。
±0.05V以下に抑制されています。
また、この高安定化回路の適用により、従来のアナログ出力型では回避できなかった出力電圧の検知距離依存性および周囲温度依存性も解消し、感光ドラム表面-プローブ検知電極間距離1.5-3.5mm、周囲温度変化0~+50°Cにおける出力電圧の変化率を1%以下とする世界トップレペルの高安定検知性能を達成。同時に11msの高遠応答性能も実現しました。



