TMRセンサによる外乱磁場ノイズに
対応した角度検知
外乱磁場ノイズによる精度の悪化は磁気センサに共通した課題です。外乱磁場ノイズ源と磁気センサの距離を確保したり、磁気シールドを配置する場合は、設計上の大きな制約となりシステムの高コスト化につながります。また、対策効果とコストのバランスを調節しながら適切な設計を選択することが困難でした。
TDKではその解決策として、複数センサにより外乱磁場ノイズ信号を抑制する方法を提案しています。下記の「対策方法概要」では、信号磁場に対して逆位相出力となる2つのセンサの出力差を利用することで外乱磁場ノイズの影響を相殺しています。
使用するセンサ数の選択により、想定される外乱磁場ノイズと許容できる角度誤差を考慮しながら、合理的な対策を選択できます。
On-Axisの対策方法概要
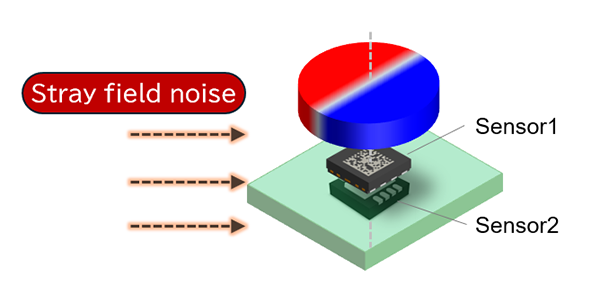
- 回転する磁石の同軸上に、基板の両面それぞれにセンサ1、センサ2を配置する。 このとき、外乱磁場ノイズに対する両センサの出力はほぼ同位相・同振幅になる。
- 同軸上の2つのセンサについて、センサ1が受ける磁場強度 B1 とセンサ2が受ける磁場強度 B2 の比は B1/B2 > 1.5 となるよう基板厚を調整すると、補正効果が向上する。
- 外乱磁場が両センサに対して同一の強度かつ同一ベクトルで作用すると仮定すると、ターゲット磁石からの磁場強度が異なるため、各センサの合成ベクトル(=出力角度)には差が生じる。
- 両センサが持つターゲット磁石由来の磁場強度の一定比と、外乱磁場によって変化した各センサの合成ベクトルの差を相殺することで、外乱磁場成分を除去できる。
- この補正は各センサの出力信号を用いて実装可能であり、高ダイナミックレンジの外乱磁場補正や、直流/交流成分の補正を実現します。
計算方法(On-Axis)
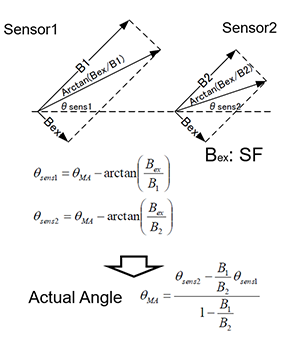
B1, B2 : センサ1・2が受け取る 「ターゲット磁石の強さ」
Bex : 外から来る余計な磁場(外乱磁場)(これがあるとセンサの出力がずれる)
θsens1, θsens2 : センサ1・2が実際に測った角度(外乱磁場で少しずれている)
θMA : ターゲット磁石の角度
θMA = (θsens2 − (B1/B2)·θsens1) / (1 − B1/B2)
この式は、外部干渉の影響を相殺するために、ターゲット磁石から受ける磁場が強い方のセンサー(Sensor1)の測定値により大きな重みを与えて、真の角度を推定するものです。
- 外乱磁場補正の有無による効果比較
| センサ数 | Sensor 1 | Sensor 1 Sensor 2 (外乱磁場ノイズ補正後) |
|---|---|---|
| 外乱磁場ノイズによる角度誤差 | ±2.87° | ±0.17° |
センサが1つの場合は角度誤差が大きい。一方で2つのセンサを使った場合は外乱磁場ノイズ補正により角度誤差が小さくなっている。
※当社シミュレーション条件において (ターゲット磁石 Br=330mT(円柱形 Φ15.0*t2.0mm, 1極対, 軸方向着磁), 外乱磁場=4kA/m(5mT相当), B1=100mT, B2=45mT, Sensor1-磁石間Gap=1.0mm, B1/B2 ratio=2.2)
B1/B2比が一定である2つのTMRセンサを用いることで、外乱磁場は補正することができる。
B1/B2 > 1.5 となるようにすることで、補正効果が高まる。
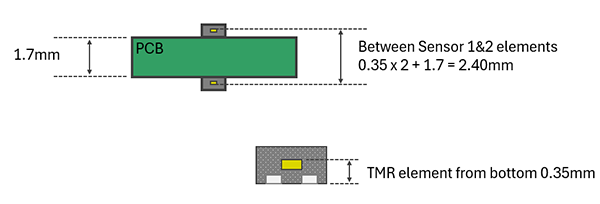
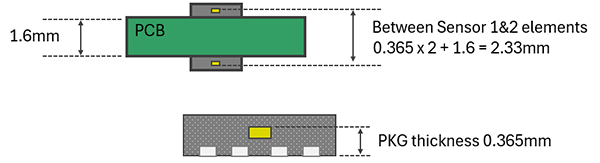
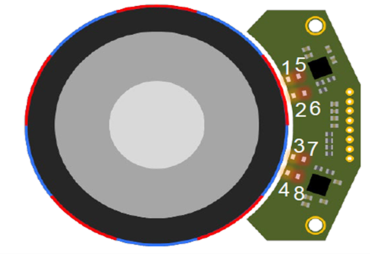
- 基板厚みの具体例
・DFN4パッケージ(TAS2240)
・DFN8パッケージ(TAS2142)
Off-Axisの対策方法概要
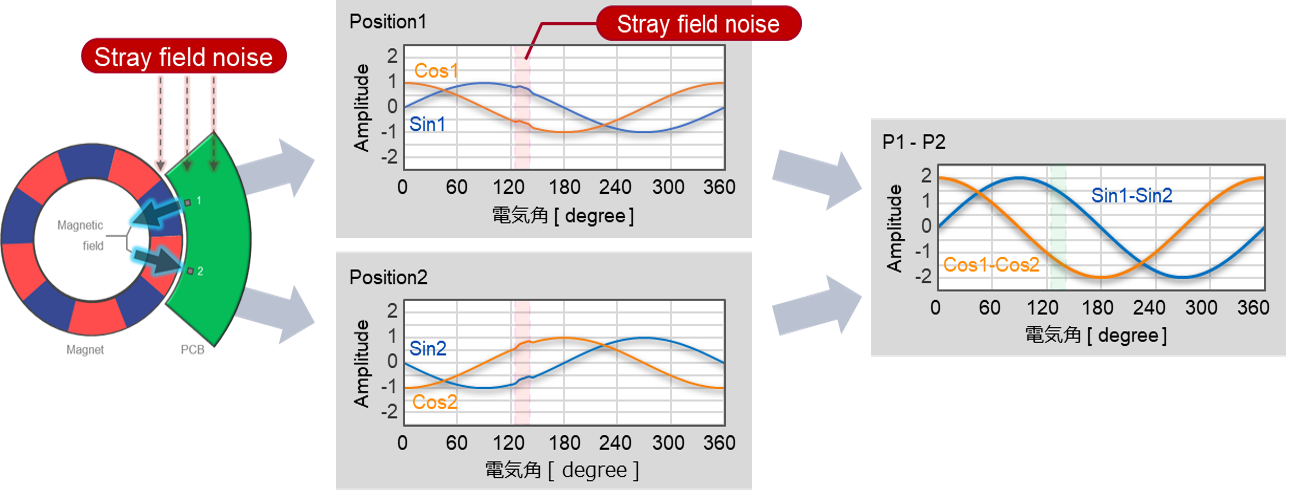
・磁石からの信号磁場に対して互いに180度逆位相出力となる位置 (Position1と2)に2つのセンサを配置する。この際、外乱磁場ノイズに対しての2つのセンサ出力は、ほぼ同相・同レベルである。
・差動出力を利用することにより、信号出力は増大し、外乱磁場ノイズによる影響は相殺される。
センサ数による効果比較
| Sensor | Sensor1 (Single) |
Sensor1 (2センサ計算)
Sensor3 | Sensor1 (4センサ計算)Sensor2 Sensor3 Sensor4 |
Sensor1 (8センサ計算)Sensor2 Sensor3 Sensor4 Sensor5 Sensor6 Sensor7 Sensor8 |
|---|---|---|---|---|
| 外乱磁場によって 生じる角度誤差 |
±1.5゜ | ±0.5゜ | ±0.35゜ | ±0.15゜ |
ターゲットとする精度、改善したい角度誤差の原因に応じて、使用するセンサの数、配置の調整が可能
※当社シミュレーション条件において (磁石Br : 270mT、外乱磁場強度: 5mT)
計算方法(Off-Axis配置)
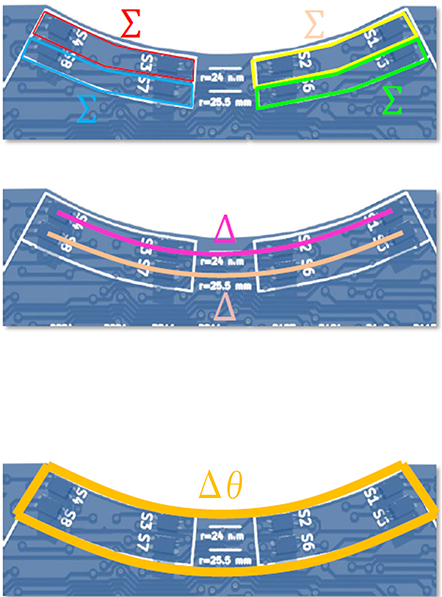
- Step1 : 隣接する2つのセンサのSin, Cos出力を足し合わせる
- S12 = S1 + S2, 同様にして S34, S56, S78
→ Off-Axis角度検出で発生する2次高調波成分の歪みを抑制 - Step2 : Step1で求められた隣接する2つのセンサ出力の和について、差分を求める
- S34 – S12 = S1234, S78 – S56 = S5678
→ 外乱磁場耐性を高める - Step3 : S1234とS5678からAtanを計算
- 内側センサから求められる角度θ1234
- 外側センサから求められる角度θ5678 - Step4 : 内側センサと外側センサの検出角度値の比較
- 外側センサは内側センサの1/2の磁場強度
- 外乱磁場に対し、θ1234はθ5678の2倍の精度
- したがって、2 x θ1234 – θ5678 = θ12345678
→ さらに外乱磁場耐性を高めることが可能
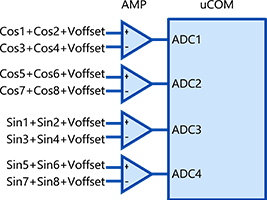
8センサ計算時のブロック図
関連情報
YouTube
ご質問・ご要望・サンプル/評価基板のご要求などのお問い合わせはこちらからどうぞ




