湿度センサ CHSシリーズ
電子式高分子湿度センサ
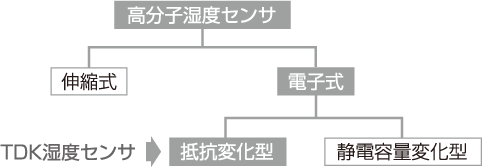
高分子湿度センサには、大別して伸縮型と電子式があり、電子式には抵抗変化型と静電容量変化型があります(図1)。以下、2つの電子式の構造、検知原理の違いを見ながら、それぞれの優位性と欠点について、説明します。
電子式高分子湿度センサの構造と原理
抵抗変化型湿度センサは、湿度の変化に対応してセンサ素子の抵抗値が変化し、その変化を電気信号として取り出すものです。
基本的な構造を図2に示します。アルミナ基板上に、金、酸化ルテニウムなどの貴金属厚膜導体をくし形に印刷して焼成し、電極を形成します。 次に、この電極上に高分子材料を塗布して感湿膜を形成します。

高分子膜の"感湿"原理については、水分子の吸着により自由に動き回るようになる可動イオンの存在で説明できます。つまり、可動イオンの数の変化によって生じるインピーダンスの変化を電気伝導としてとらえていると考えられています。
それに対し、静電容量変化型湿度センサは、湿度の変化によりセンサ素子の静電容量が変化する性質を利用し、その変化を電気信号として取り出します。図3はその基本構造です。アルミナ基板上にAu-Ptなどの下部電極を形成し、その上にセルロースやPVAなどの高分子感湿膜を数μmの厚さで均一に塗布し、さらにその上にAu薄膜などにより、上部電極を形成します。つまり、静電容量変化型は、高分子膜を誘電体としたコンデンサとなっています。

容量変化型と抵抗変化型の特徴
容量変化型湿度センサ素子はリニアリティに優れ、相対湿度0%RHからの計測が可能です。
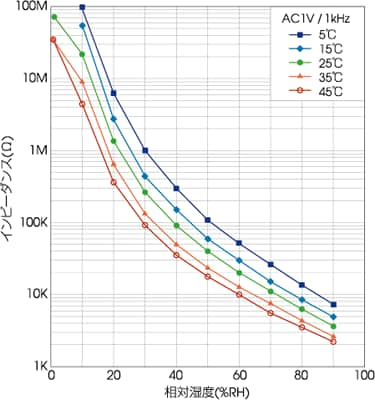
しかし、その一方で、0%RHにおける静電容量が数100pFと大きく、また0%~100%RHでの静電容量変化幅が数10pFと小さいので、小さい容量変化を拡大することと、大きなゼロオフセットを相殺することが同時に必要となるため、回路は非常に複雑かつハイコストになり、また定期的な較正が必要となるなどの欠点があります(図4)。

抵抗変化型の総合優位性
しかし、抵抗変化型のインピーダンス変化幅や温度特性については、回路技術の改良で克服、解決が可能であり、使いやすく安価であるという特長を十分に活かすことが可能です。また、低湿度領域で不感となる問題についても、5%RH以下の計測を敢えて切り捨てることによりオフセット調整を不要とすることができ、オフセット変動による経年変化もなくなることから、定期的な校正作業も不要になるなど、実用上大変優位な利点に変えることができます。
このような検討から、TDKの湿度センサには抵抗変化型を採用。独自開発の高分子材料と回路設計技術により、上記した抵抗変化型の優位性を最大限に引き出すユニットを実現し、民生機器、事務機器、計測機器など、多様な分野に広くご採用いただいています。
CHSシリーズの信号処理回路
TDKの湿度センサユニットCHSシリーズの信号処理回路について、図5に示す回路ブロック図および回路図をもとに説明いたします。

駆動回路
湿度センサ素子には電気分解(分極) を避けるために直流成分をカットするコンデンサC2を介して、AC電圧を印加しますが、このときの周波数として、通常は200Hz~10kHzが選択されます。それというのも、200Hz以下の低周波では、高湿下における容量性インピーダンスが無視できなくなるためと、10kHz以上の高周波では、反対に低湿下でのインピーダンスが低くなるためです。
しかし、それでも低湿、高湿領域においては完全な指数関数変化ではなく、変化幅が小さくなっています。 このため、このセンサ素子固有の特性をそのまま対数圧縮しても直線性の良い出力が得られないので、実際にはいくつかの湿度範囲に分割し、それぞれの圧縮率を変えることによってリニアライズを行っています。
CHSシリーズの駆動回路は、湿度センサ素子自身のインピーダンスで駆動周波数を変化させるZ-f変換回路を用いています。つまり、低湿領域では駆動周波数を低くしてインピーダンスを高め、高湿領域では反対に駆動周波数を高くしてインピーダンスを低くすることで指数関数に近い特性力ーブとし、対数圧縮したときにリニアライズしやすくしています。
リニアライズ回路
抵抗変化型湿度センサは、湿度に対するインピーダンス変化が指数関数的になるため、対数圧縮が必要になることは前述しましたが、通常、この対数圧縮はログアンプによります。
CHSシリーズでは、Z-f変換回路によって得られた湿度により変化する周波数を、パルス幅τのパルス波形に変換します。このとき非線形素子を用い、パルス幅τを低湿度のときは大きく、高湿度のときは小さくするような負帰還の時定数制御を行っており、その結果、図6(左)のグラフに示すような指数関数特性が対数圧縮され、図6(右)のグラフのような出力電圧特性になります。

温度補償回路
容量変化型と抵抗変化型の特徴を記したときに、感湿素子のインピーダンス温度特性グラフを2つ掲示しましたが(図4)、その「温度別」のほうのグラフの各特性ラインが示すように、湿度センサ素子のインピーダンス値は、20~30°Cの温度差で2~3倍もの変化を示しています。NTCサーミスタのインピーダンス温度特性は2倍以下ですから、サーミスタだけで湿度センサの温度補償を行うのは無理です。
そこで、CHSシリーズでは、駆動回路、リニアライズ回路などに用いる半導体素子すべての温度特性を見極め、それらを総合的に用いることで湿度センサ素子の温度補償を行っています。もちろん、そのためには湿度センサ素子と信号処理回路を一体化し、なおかつ同一温度にすることが絶対条件となります*。
* 湿度計測においては熱平衡が非常に大切なファクタとなるので、信号処理回路部の発熱が大きいと、検知素子部と回路部を一体化することは困難になります。TDKではC-MOS ICを用い、最大消費電流を0.5mA以下に抑えることで信号処理回路の発熱を大幅に抑制し、この課題をクリアしました。
また、NTCサーミスタを補助的な温度補償素子として用いることももちろん可能です。これにより、さらに広い温度範囲にわたり安定した性能が得られます。
出力規格化回路
CHSシリーズは、出力を直読しやすいように、100%RHのときの出力が、Edc 1Vとなるように回路を規格化しています。
CHSシリーズの検知・出力特性
これらの信号処理回路を用いることによって、従来型の抵抗変化型湿度センサの欠点とされてきた温度特性、リニアリティ特性を大幅に改善でき、静電容量変化型と同等以上の出力精度と安定性を得ることができました。
NTCサーミスタを上回るインピーダンス温度変化率をもつ抵抗変化型湿度センサ素子を用いながら、広範囲にわたりフラットな検知特性を実現しています。
また、湿度に対するインピーダンス変化を対数圧縮することにより、環境要因などによる検知感度の劣化も圧縮され、その結果、初期特性を長期にわたり堅持する優れた安定性も達成しました。
実用上のメリット
信号処理回路とセンサ素子が一体化されているため、センサ素子だけをケーブルで離す必要がなく、低湿で素子のインピーダンスが高くなってもノイズの影響を受けない正確な信号処理が可能です。また、直流信号に処理された後なので高価なシールドケーブルを用いなくてもケーブルを長距離引き回すことが可能です(150mまで実験済み。理論的には2km程度まで可能です)。
また、センサ素子と信号処理回路部が一体化されたことで、ユーザー側ではセンサ素子のばらつきやセンサ素子交換に伴う回路の調整が不要となり、使いやすさという点で大きなメリットがあります。



