TMR角度センサの出力遅延と角度誤差の関係
モーター位置制御など回転動作中の角度検出をする際に考慮しなければならないのがセンサからの出力遅延時間です。
時間応答性が悪いセンサを使った場合は、真の角度に対し、出力遅延時間分だけ過去の角度情報を観測していることになり、過去の角度情報に基づく制御はモーターの異音の発生につながりかねません。
そこで今回の記事では、TMR角度センサの出力遅延と角度誤差の関係についてご説明します。
アナログ出力のセンサの出力遅延時間を決める要因は2つ
- 1.TMR素子の印加磁場変化に対する時間応答性
- 2.センサ回路全体の電気的変化に対する時間応答性
です。
1つ目の磁気変化に対する応答性については、磁気の変化を観測することは難しく、
弊社ハードディスクドライブ分野におけるTMRセンサ例では、1GHzを超える信号読み出しの製品実績があり十分な応答性を兼ね備えているテクノロジーと言えます。
2つ目の電気回路の応答性については、弊社製品 TAS2141-AAAA をサンプルに使った測定結果を示します。
図1のようにVcc pinにTr=0.616 nSec 1Vp-pのパルスを入力し、センサ出力の応答性を観察し、
Rise time Tr =10.93nSec ≥ Bandwidth 32MHz を確認しています。
この入出力伝搬遅延時間はTMRセンサ内部回路の抵抗と寄生容量の時定数によるものです。
仮に2極の検知用磁石を用いるとすれば、1,920Mrpm までの超高速域の信号を扱えることを意味し、ほとんどの角度検出ニーズに対する出力遅延時間による角度誤差は無視できるほどに小さいと言えます。
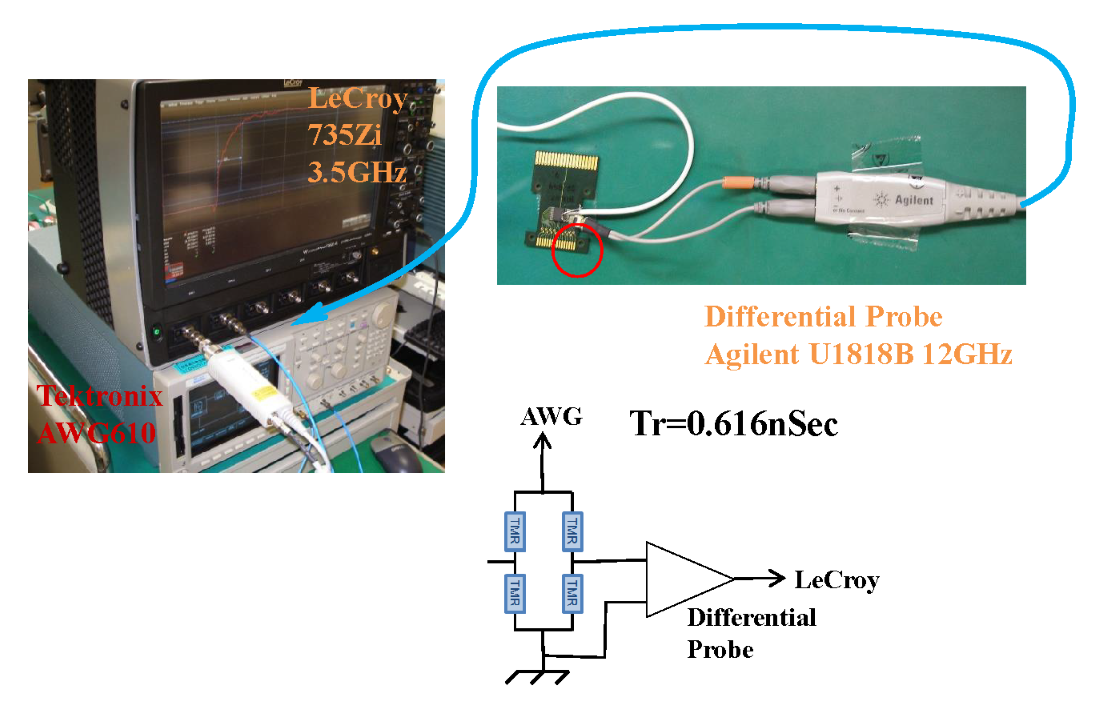
図1. アナログ出力製品の出力応答の測定環境
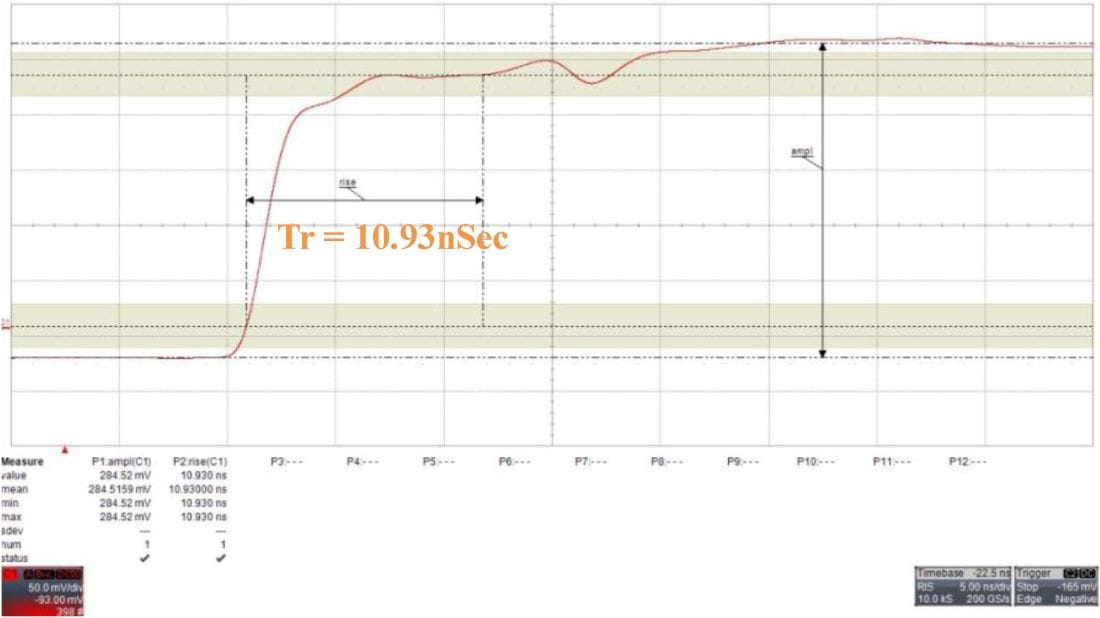
図2. アナログ出力製品の出力応答 Rise time Tr =10.93nSec
デジタル製品の出力遅延を補う予測機能
一方でデジタル出力センサは、アナログの要因に加え、ASICの演算処理による出力遅延も考慮に加わえなければなりません。
出力遅延時間が長い場合は、角度誤差の増加が懸念されるため、TDKのデジタル出力センサは出力遅延を予測する機能(Prediction feature)を実装することにより、出力遅延時間分の未来の出力を出すことで、遅延がないようにふるまいます。
下表1・図3 に予測機能の有無による出力遅延時間による角度誤差を示します。
| 回転速度 [rpm] |
回転周期 [μS] |
角度誤差[deg] | |
|---|---|---|---|
| 予測機能なし 遅延225μs(最大) |
予測機能あり 遅延 5μs(最大) |
||
| 1,000 | 60,000 | 1.4 | 0.0 |
| 5,000 | 12,000 | 6.8 | 0.2 |
| 10,000 | 6,000 | 13.5 | 0.3 |
| 16,667 | 3,600 | 22.5 | 0.5 |
| 20,000 | 3,000 | 27 | 0.6 |
| 33,333 | 1,800 | 45 | 1.0 |
| 66,667 | 900 | 90 | 2.0 |
| 100,000 | 600 | 135 | 3.0 |
表1. 出力遅延時間による角度誤差
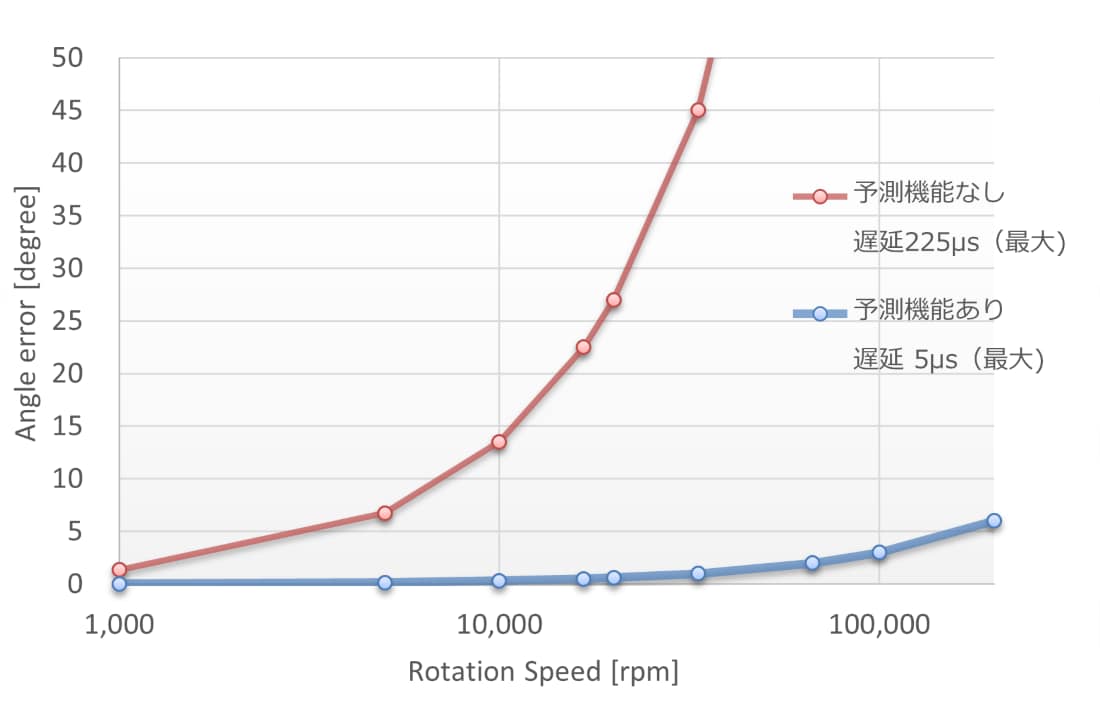
図3. 出力遅延時間による角度誤差
[計算式]
出力遅延時間による角度誤差[deg]=360[deg] * 遅延時間 / 回転周期
まとめ
・TDKのアナログ出力製品は、十分に高い出力応答速度を備えており、出力遅延時間の対策をとらなくても使用でき、コスト低減に貢献します。
・TDKのデジタル出力製品は、予測機能(Prediction feature) により、出力遅延時間による角度誤差の悪化を気にすることなく使用できます。
関連情報
関連製品
-

TAD2141-BAAA
TMR角度センサ
Digital Output SPI/PWM
TSSOP-16Redundancy=No
0 (Single)
角度精度 (全温度範囲)=+/-0.3 deg -

TAS2141-AAAB
TMR角度センサ
Analog Output 1.5Vp-p (Differential Sin+ - Sin- / Cos+ - Cos-, 5.0V applied) TSSOP-8
Redundancy=No
0 (Single)
角度精度 (全温度範囲)=+/-0.6 deg -
TAS2142-AAAC
TMR角度センサ
Analog Output 3.0Vp-p (Differential Sin+ - Sin- / Cos+ - Cos-, 5.0V applied) TSSOP-8
Redundancy=No
0 (Single)
角度精度 (全温度範囲)=+/-0.6 deg -
TAS2143-AAAA
TMR角度センサ
Analog Output 3.0Vp-p (Differential Sin+ - Sin- / Cos+ - Cos-, 5.0V applied) TSSOP-8
Redundancy=No
0 (Single)
角度精度 (全温度範囲)=+/-0.8 deg
ご質問・ご要望・サンプル/評価基板のご要求などのお問い合わせはこちらからどうぞ
また、Web未掲載のセンサ製品もございます。詳細は最寄りの営業までお問い合わせください。
お問い合わせ先のご案内
 メールでの
メールでの【注意事項】
※メールでお問い合わせのお客様はお名前、会社名、部署名を記載の上、お問い合わせください。
ご記入いただいた個人情報は、お問い合わせへの回答、情報提供のために使用させていただきます。
※正しくご記入いただけない場合やお問い合わせ内容によっては、回答できない場合がございます。
※お問い合わせ内容によっては、回答にお時間をいただく場合がございます。



