CAN FD用コモンモードフィルタ - ACT1210D

その中でも「走る・曲がる・止まる」といった、極めて高い信頼性を求められる通信にはCAN (Controller Area Network) という通信システムが使用されています。
目次
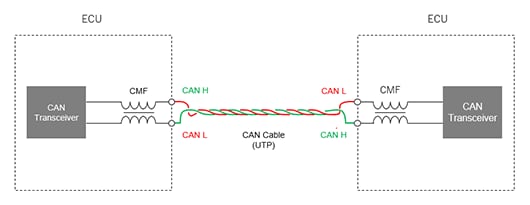
CAN BUS通信回路と伝送波形
CAN は一般的に500kbpsの通信速度ですが。より大容量データの高速通信を可能にするため、CAN FD (CAN with Flexible Data rate) という通信プロトコルが規格化され、車両に搭載され始めました。(図1、図2) CAN FDの通信速度としては、2Mbps, 5Mbps, 8Mbpsの3つの速度が規定されております。(表1)

| 項目 | CAN | CAN FD |
|---|---|---|
| 通信速度 | 500 kbps | 2,5,8Mbps |
| 通信線 | ツイストペア結線 | |
| 電気信号の種類 | 差動電圧 | |
| データ長 | 1 から 8 Byte (可変) | 1から8,12,16,20,24,32,48,64 Byte (可変) |
CAN/CAN FDネットワーク構成
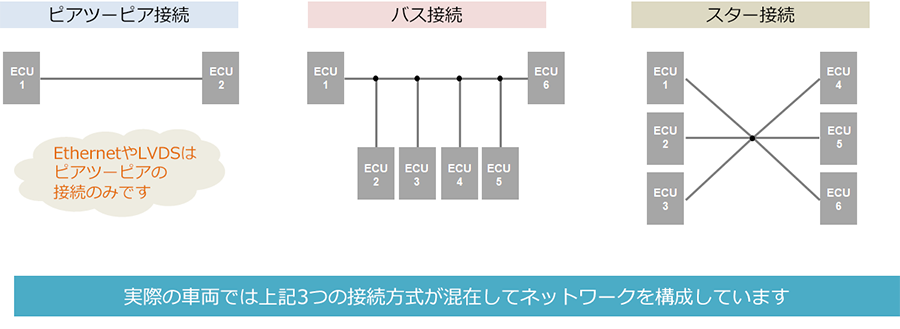
CAN (CAN FD)通信システムの特徴として1つのバスライン上に複数の機器をつなげ、相互にデータをやり取りできます。(図3)近年車両に多く搭載され始めた100BASE-T1や1000BASE-T1といったEthernetやLVDSは1対1の接続が必要となりますが、CANは1対n接続が可能であり、ECUの追加等 システムの変更が発生する際も配線等の見直しも最小限に抑えられる等、自由度が大きい事もメリットとして挙げられます。
CAN/CAN FDネットワークは同一バス上に複数の機器(ECU)を接続することが出来ます
リンギングについて
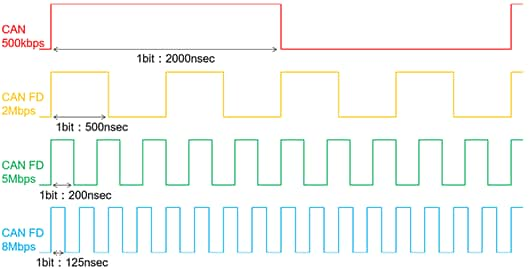
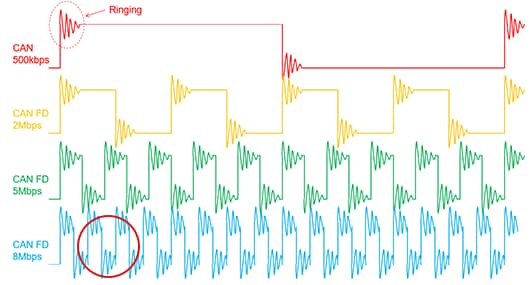
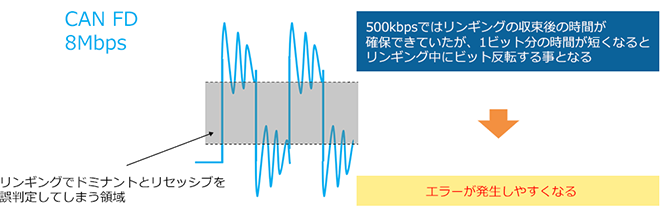
CAN (CAN FD)通信システムはその自由度の大きさ故、バス上に反射点が多くなってしまったり、ぶら下がるECUの容量成分が大きくなることから、通信信号による「リンギング」が発生しやすくなってしまいます。図4はCAN 500kbpsとCAN FD 2Mbps, 5Mbps, 8Mbpsの1bit分の時間を比較したものです。図5は信号をリンギングが発生する通信回路構成で伝送した時のリンギング波形のイメージです。1ビット分の時間の立ち上がりと立下りの部分に同じリンギングが観測されます。
通信速度が遅い領域では1bit分の時間が長いことからリンギングの時間は比率として短く、リンギングの収束後の時間が長いことから安定してHIとLOを判定できると考えられますが、通信速度の速い領域ではリンギングが収束する前にHIからLOに推移する事となり、このリンギングがHI/LOの判定に影響を与え通信エラーが発生する可能性が大きくなります。
リンギング発生要因
リンギング発生要因としては、以下の様な原因が考えられます。
(1)CANハーネスの分岐点による反射(トポロジー設計)
(2)ECUからワイヤーハーネスを含む全体のインダクタンスと浮遊容量(ハーネス長、PCBパターン設計)
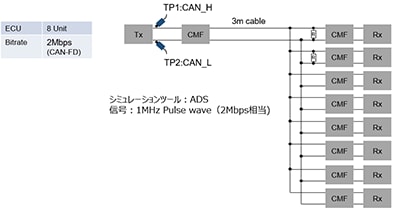
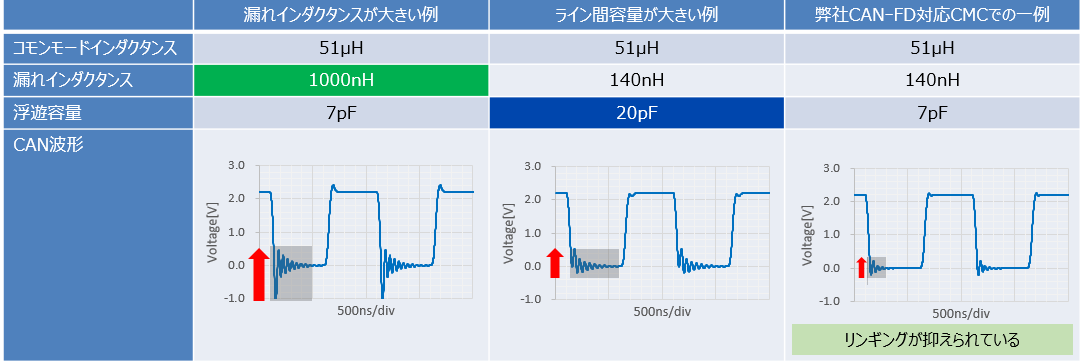
表2は弊社にてシミュレーターを使用し意図的にコモンモードフィルタの漏れインダクタンスとライン間容量を大きくした場合のリンギング波形をシミュレーションした結果の一例です。
これらから漏れインダクタンスとライン間容量がリンギングに影響を与えることがわかります。そのためECUのEMC対策のためPCB上に搭載されるコモンモードフィルタに求められる特性としては、ライン間の漏れインダクタンスと浮遊容量を出来る限り小さくすることが求められます。
CAN FDに最適なコモンモードフィルタ
前記のような不具合を回避するためIEC等の団体でコモンモードフィルタには各種特性規格制定が進められており、TDKはこれらの要求特性を満足したCAN FD対応したコモンモードフィルタ「ACT1210D タイプ」を用意しています。
■ACT1210Dタイプ
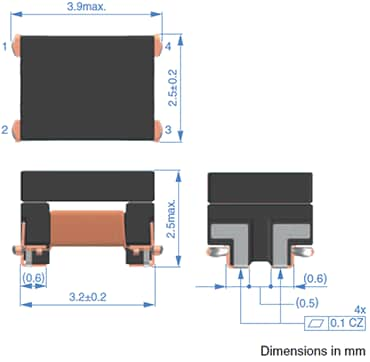
■形状と寸法
■製品の特徴
- 3225サイズでの対応
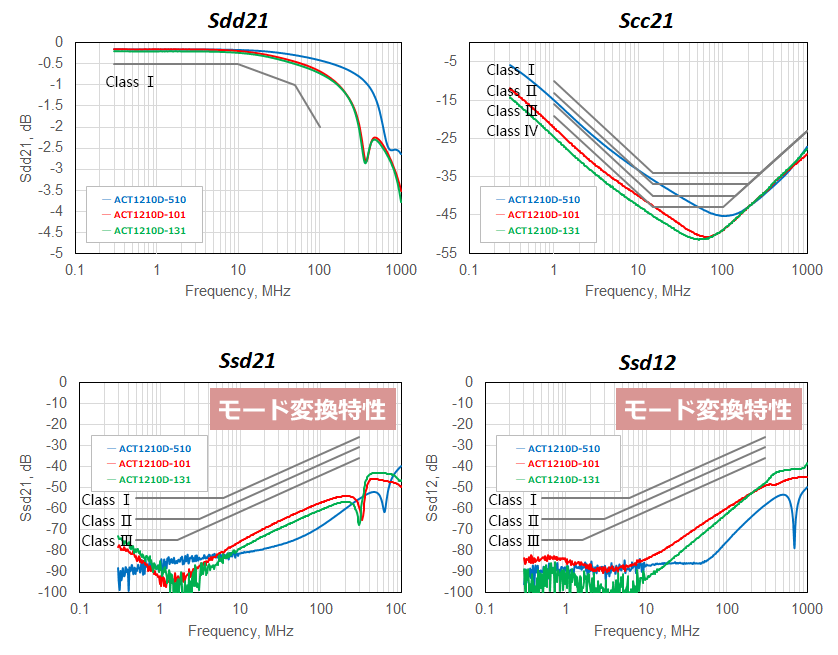
- 独自の構造設計により、業界最高レベルのモード変換特性(Ssd21)を実現。
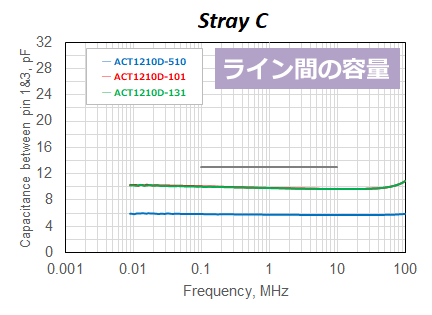
- CAN FDに対応した良好なStray Cを実現
- 金属端子およびレーザー溶接による継線方法採用により、高信頼性を確保し、-40 ℃~+150 ℃の使用温度範囲に対応
- AEC-Q200に準拠した信頼性を確保
- 独自の自動巻線技術により、安定した量産を実現
■特性規格
| コモンモードインダクタンス [100kHz] (μH) |
許容差 | 直流抵抗 -40 to +125°C (Ω)max. |
絕緣抵抗 (MΩ)min. |
定格電流 (mA)max. |
定格電庄 (V)max. |
品番 |
|---|---|---|---|---|---|---|
| 130 | +50/-30% | 3.5 | 10 | 115 | 80 | ACT1210D-131-2P-TL00 |
| 100 | +50/-30% | 3 | 10 | 115 | 80 | ACT1210D-101-2P-TL00 |
| 50 | +50/-30% | 3 | 10 | 115 | 80 | ACT1210D-510-2P-TL00 |
CAN FD対応CMC ACT1210シリーズの輻射EMIデータと差動信号波形比較
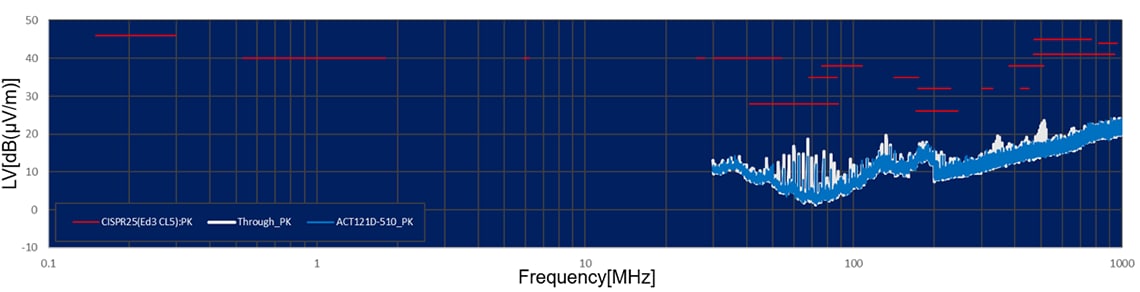
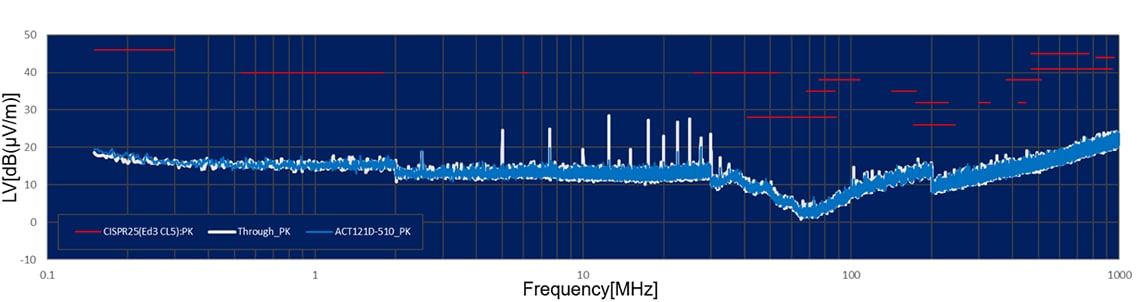
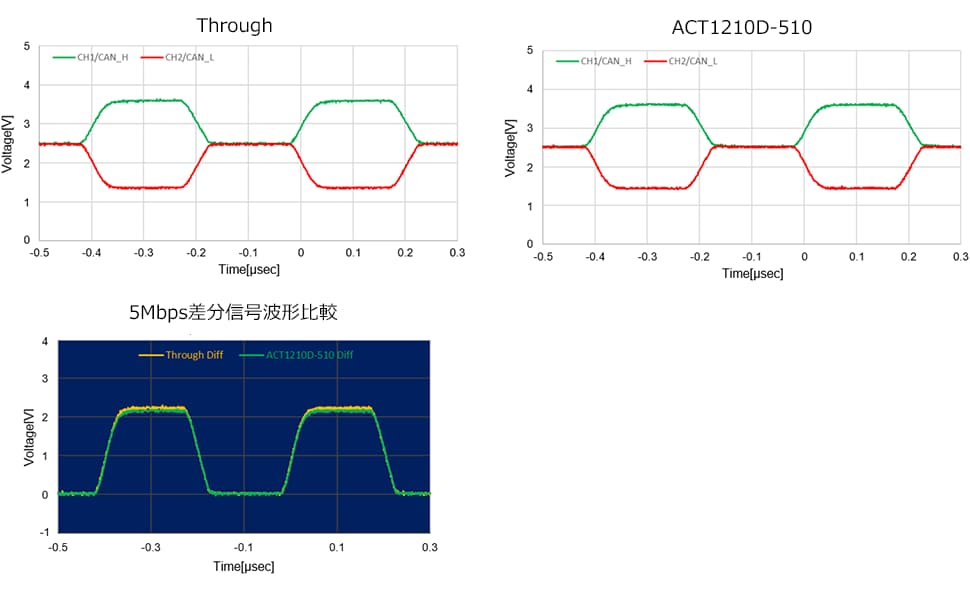
本項ではACT1210D-510(開発中)を使用し、CAN FD対応CANトランシーバーを搭載した弊社製実験基板を使用しCISPR25 ALSE法での評価を行った一例を紹介します。通信速度は5Mbpsでコモンモードフィルタの効果が確認できます。図9及び図10は輻射EMI評価を行ったシステムでの波形評価結果です。TX側、RX側双方にACT1210D-510(開発中)を実装し、RX側トランシーバーのCAN HとCAN Lの差動信号を観測し、演算で差動信号を表示しています。コモンモードフィルタなし(Through)との比較でも立ち上がり、立下り波形での差は見られません。(図11)
まとめ
ACT1210Dタイプは 巻線工法を含む独自の構造設計により、漏れインダクタンス、浮遊容量、モード変換特性を最小にし、従来よりリンギングによる影響を受けやすいCAN FDアプリケーションに最適化した製品です。TDKは今後も車載通信用コモンモードフィルタの総合的な製品サービスの提供により、お客様の要求に応えてまいります。





