ロボット掃除機に搭載されているセンサの仕組み

初期のロボット掃除機はインテリジェンスが非常に未熟で、あちこちに衝突しながらやみくもに動き回る、弱点だらけのロボットでした。以前に居たところがわからないため掃除の取り残しが多かったり、身動きがとれなくなったり、掃除中にバッテリーが切れて立ち往生したりといったトラブルは日常茶飯事でした。しかも、従来のコード付き掃除機に比べてダストボックスが小さいため、満杯になると吸い込みが極度に弱まり、ただ動き回るだけでゴミをまったく吸っていないこともしばしばありました。その後、さまざまなセンサ技術やモータ制御技術の革新的な活用により、ロボット掃除機は年々急速に進化を遂げていき、いまでは格段にスマート化され、前述のような課題はおおむね克服しています。
目次
走行の性能
ロボット掃除機の基本となるのは、高精度で走行する能力です。そこで、TDKのインテリジェントな組み込みモータコントローラ「HVC 4222F」が威力を発揮します。本製品は、各種ステッピングモータ、ブラシ付きDCモータ(BDC)、ブラシレスDCモータ(BLDC)をダイレクトにコントロールします。モータを高度に駆動制御し、ギアを回転させて、走行輪が掃除機本体を正しい方向に誘導できるようにします。こうした機械要素が高精度に作動することは、センサの使用に関係なく、掃除機の逸脱のない走行を確保するうえできわめて重要です。たとえば、走行輪が90°で旋回すべきときに、実際に90°で(88°ではなく)旋回しているかどうかは、ある程度時間が経過してもロボットが自機の位置を正しく把握できるかどうかを左右します。
床面・段差・障害物検知
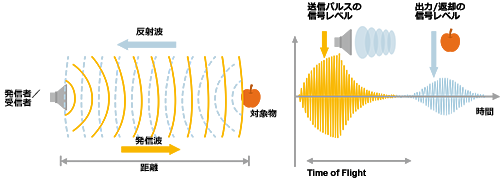
超音波ToF(Time-of-Flight)センサは、対象物との距離を測定します。TDKの高性能ToFセンサ「CH101」(短距離検出用)は1.2メートル、「CH201」(長距離検出用)は5メートルまでの高精度な測定が可能です。超音波パルスを発信して、センサの視野(Field of View: FoV)内にある対象物から返ってきた反射波を受信し、内蔵の処理ユニットが超音波ToFを計算することにより、外部の制御ユニットが対象物との距離を推定します。光学式センサと異なり、超音波センサは暗闇を含むあらゆる照明条件下で動作し、対象物の色や透明度に左右されずに(ガラスなどの透明な面も検知可能)、ミリメートル単位のすぐれたセンシング精度を提供します。
長距離検出用「CH201」をロボット掃除機に使用すれば、人の動きや異物などの動・静物体を昼夜問わず検知できます。障害物があれば、ロボットは移動ルートを即座に変更して、衝突を回避します。短距離検出用「CH101」は、床面のタイプを自動判別するのに有効です。かたい、やわらかいなどの対象物表面のテクスチャは、反射波の振幅をもとに検知します。たとえば、フローリングから(走行抵抗のより大きい)カーペットに移動する場合、センサが床面のタイプを見分け、モータに加速を指示することが可能です。ToFセンサはこのほか、階段などの段差を検知して転落を防止するのにも利用できます。
超音波センシングの基本
| 床面検知 | 障害物検知 | 落下・段差検知 |
|---|---|---|
 |
 |
 |
走行ルートの選定
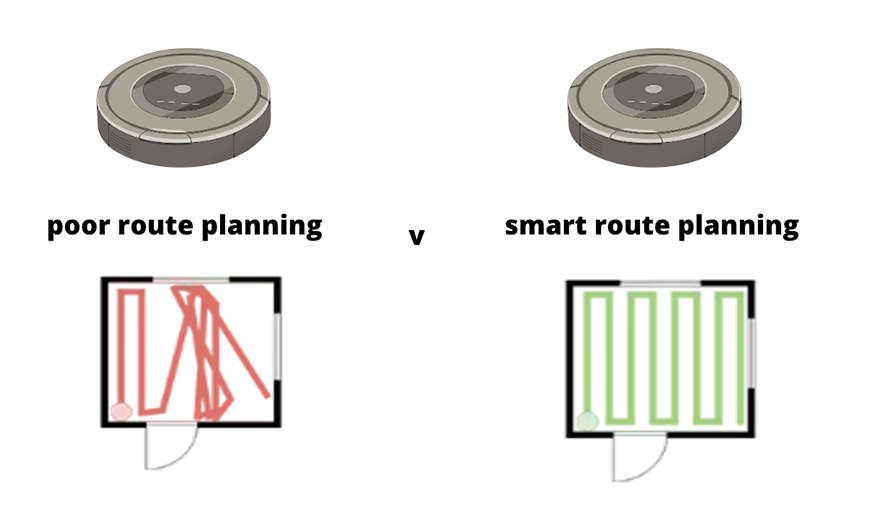
多くのロボット掃除機に搭載されているナビゲーションソリューションは、VSLAM(Visual Simultaneous Localization and Mapping)やライダー(LiDAR)技術を用いて、室内の仮想地図を作成することで、ロボットがより効率的・効果的に動き回れるようにしています。ところが、人がロボットをもちあげて別の場所に移すと、ロボットは自分がいまどこにいるのかがわからなくなってしまいます。その場合は、ひたすらやみくもに動き回って壁をなぞりながら部屋の形状を確認し、地図と照合することで、自分の位置を把握しなければなりません。TDKの慣性計測装置(Inertial Measurement Unit: IMU)「ICM-42688-P」は、こうした非効率を解消するのに役立ちます。
この6軸モーションセンサは、ロボットの動き(直線と回転の両方)のロール角、ピッチ角、ヨー角を検出、これらの値と室内のマッピングをもとに、精確な自己位置を推定します。したがって、誰かがロボットを持ち上げて別の場所に移しても、ロボットは現実空間のなかでの位置を認識できるのです。
VSLAMやライダーによるマッピング技術を使用しない場合、自己位置推定やナビゲーションは、デッドレコニングを用いておこなうことが可能です。IMUの慣性計測を用いた走行輪の回転数にもとづく位置推定と、ToFセンサによる物体の検知の二種のセンサを組み合わせることで、ロボットは適切に走行ルートを選定し、自機を精確にナビゲートすることができます。
音声認識
音声アシストによるAI機能を搭載する場合、高性能なマイクロフォンが必須です。TDKのマルチモードデジタルマイクロフォン「ICS-43434」は、こうした用途に理想的な特性を備えています。もっとも現時点では、掃除機のモータや回転ブラシなどの運転音が大きく、音声が拾いにくいという課題がありますが、運転音が静かになれば、アルゴリズムをトレーニングして、ノイズのなかからユーザの声のみを聞き分けることができるようになるでしょう。そうなれば、たとえば口頭で掃除をしてほしい場所を指示したり、掃除をやめるよう命令したりといったことも可能になります。もう一つのソリューションとして、マイクがユーザの音声を検知すると、ロボットに内蔵された(「HVC 4420F」などの)高度なモータコントローラがモータを減速/停止して運転音を抑え、マイクが命令を拾えるようにすることも可能です。
「ダストボックス満杯」検知/自動充電
ダストボックス内のゴミの溜まり具合は、圧力センサを用いてボックス内の気流を監視することで検知できます。TDKの気圧センサ「ICP-10101」は、こうした用途に好適です。ダストボックス内の気圧低下をセンサが検知して、ロボットに「満杯」を知らせます。すると、ロボットは掃除をいったん中断し、充電ステーションに帰還。ハイエンドな充電ステーションのなかには、自動でゴミを吸い出してくれるものもあります。ダストボックスが空になると、ロボットは掃除を中断した場所にふたたび戻り、掃除を再開します。
一方、掃除中にバッテリー残量が少なくなり、所定のSoC(State of Charge)レベルになると、バッテリー管理システムがロボットに知らせ、掃除を中断して充電ステーションに戻り、充電をおこなうよう指示します。充電が完了すると、ロボットは掃除を中断した場所に再び戻り、掃除を再開します。
ロボット掃除機は、理論上は、部屋の大きさに関係なく、持続的に走行することが可能です。
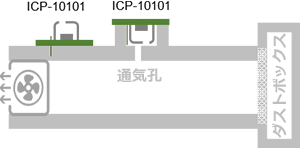

・圧力センサを用いてダストボックス内の気流を監視
・ゴミのたまり具合やフィルタの詰まり具合を判別
・オプションとして、もう一個の同様の圧力センサを使って、HVACなどの外部環境影響を排除し検出精度を高める。
自己診断機能
TDKのNTCサーミスタは温度センサの一種であり、MCUやMPUの温度監視に適用することが可能です。また、モータやブラシギアの温度監視にも適しています。掃除機の回転ブラシにゴムバンドや髪の毛などがからまると、モータの電流が増大して発熱するおそれがあります。温度センサが異常な発熱を検知した場合に、ロボットにしばらく運転を休止するよう指示したり、さらには、原因を突き止めるためにシステム診断を実行するなどの「自己診断機能」を搭載するのも有効です。
開発プラットフォーム
「TDK RoboKit1」は、本稿で紹介したすべての製品をシングルボードに集積した、ロボット専用の開発プラットフォームです。基本的なロボット掃除機アプリケーションの製作に必要な部品や技術をワンストップで提供することで、開発の効率化、省力化、高速化に貢献します。本キットは、ソフトウエアライブラリに加え、ROS1とROS2に対応するドライバも備えているため、設計チームの個別のアプリケーションに応じて、アルゴリズムをカスタマイズしたり、新規に開発することも可能です。
サービスロボットの高度な制御を実現するTDKの各種センサソリューションの詳細については、当社の「ロボット掃除機ソリューションガイド」をご覧ください。




